
2025.2.12
Conducted guidance control and flight tests in Minamisoma City, Fukushima Prefecture. Successfully acquired data for improving the control system design function in the research and development platform "P4SD"
- ASCA
- Technology

INNOVATIVE SPACE CARRIER INC.(Chuo-ku, Tokyo; CEO; Kojiro Hatada, hereafter referred to as “ISC”) is “a world where people and cargo are delivered every day. We are a start-up company that aims to realize a transportation system that makes space possible.
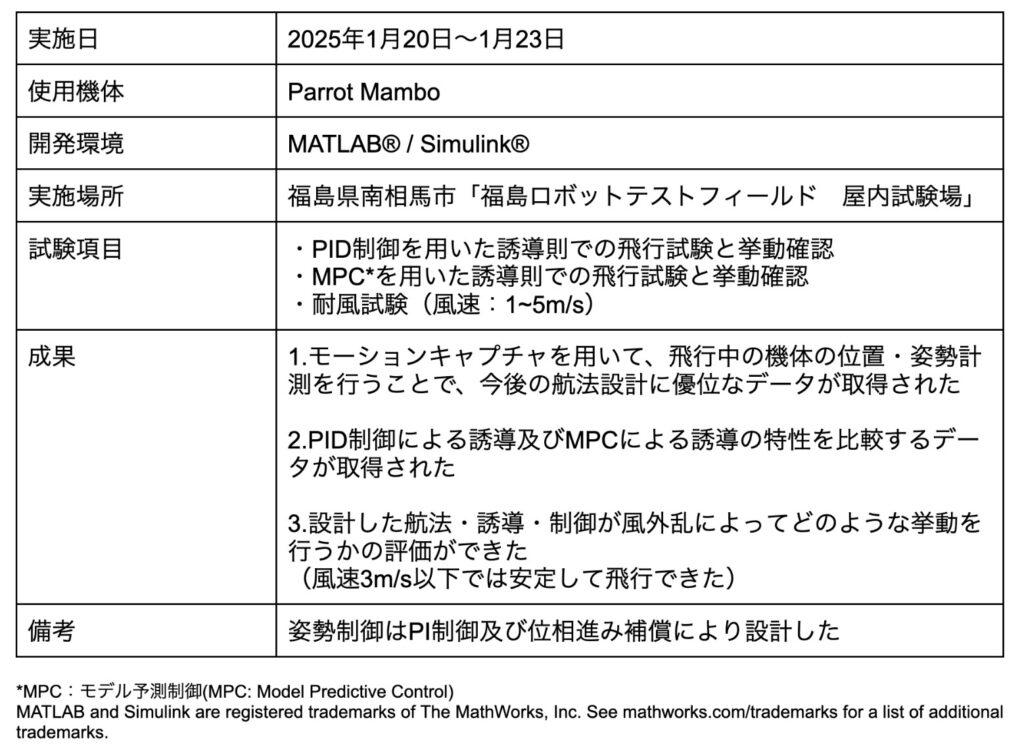
We have conducted a guidance control and flight test using a quadcopter drone at the Fukushima Robot Test Field in Minamisoma, Fukushima Prefecture from January 20 to 23, 2025.
And as a result of the test, we succeeded in instantly reviewing the guidance control design by writing flight software from a simulator, immediately flying it, and measuring it (implementation of DevOps).
*DevOps is a methodology, structure, and culture that integrates the development and operation of software and systems. The goal is to streamline the process from software development to market launch by having development personnel (simulators and control designers) and operations personnel (flight testers and instrumentation personnel) work closely together. p4sd incorporates these processes into its platform to facilitate rocket development P4SD is a platform for the development of rockets.
P4SD, a research and development platform that dramatically improves development efficiency
We are a venture company founded in May 2022 with the challenging goal of putting a satellite into orbit by 2028. To achieve this goal, a dramatic improvement in development efficiency is essential.
Conventional rocket development is generally a waterfall development process, and the vertical division of processes and lack of flexibility in specification changes have had a negative impact, such as prolonging the development period due to specification changes during the development period. Therefore, in order to shorten development time by utilizing agile development methods, we use our own research and development platform, “P4SD” (Platform for Space Development).
“P4SD” is a research and development platform that converts all development-related processes into data and consolidates them on the cloud. It converts research and design, as well as test results, into data and consolidates them. All aspects of development, including subsequent analysis and improvement, can be centrally managed.
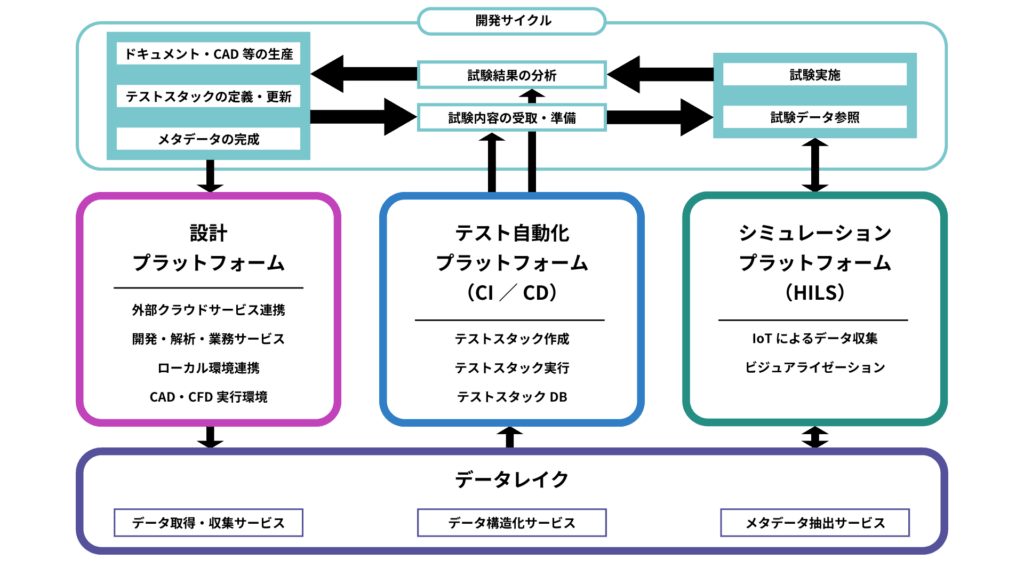
“P4SD” makes it possible for all members involved in development to obtain the same information anytime, anywhere, and enables agile development.
Reference:
Succeeded in Japan’s first “tripropellant method” combustion test. In addition, the effectiveness of the P4SD research and development platform was confirmed.
https://innovative-space-carrier.co.jp/en/news/20231225/
Guidance control and flight test of a quadcopter drone to establish a control system design and development verification platform in P4SD
In order to maximize the use of the research and development platform, it is essential to implement HILS* functionality.
Therefore, we conducted drone guidance control and flight tests at the Fukushima Robot Test Field in Minamisoma City, Fukushima Prefecture, from January 20 to 23, 2025, for the purpose of implementing a DevOps flow as the first step in the construction of a HILS environment.
The results demonstrated that it is possible to instantly iterate, modify and change the control law, and immediately fly write.
In preparation for this test, a series of DevOps flows have been implemented by improving the flight test platform based on control system development to improve the control system design function in the P4SD research and development platform.
In addition, it has been demonstrated that the development can be completed in a short period of time (approximately 2 weeks), even when significant changes are made to the induction rules after the base platform is built.
HILS (Hardware In the Loop Simulation) is a verification method that incorporates actual hardware into a simulation environment for testing. By linking actual hardware and controllers with simulators, it enables testing, evaluation, and verification that are in line with reality.
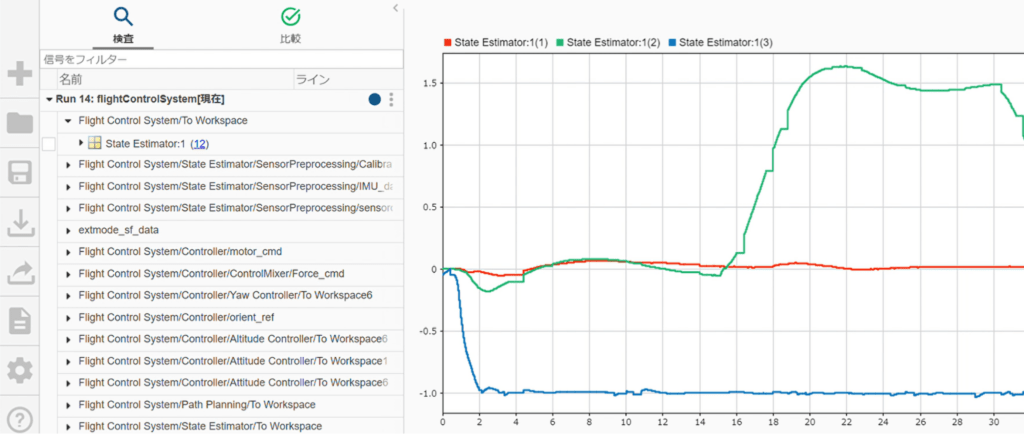
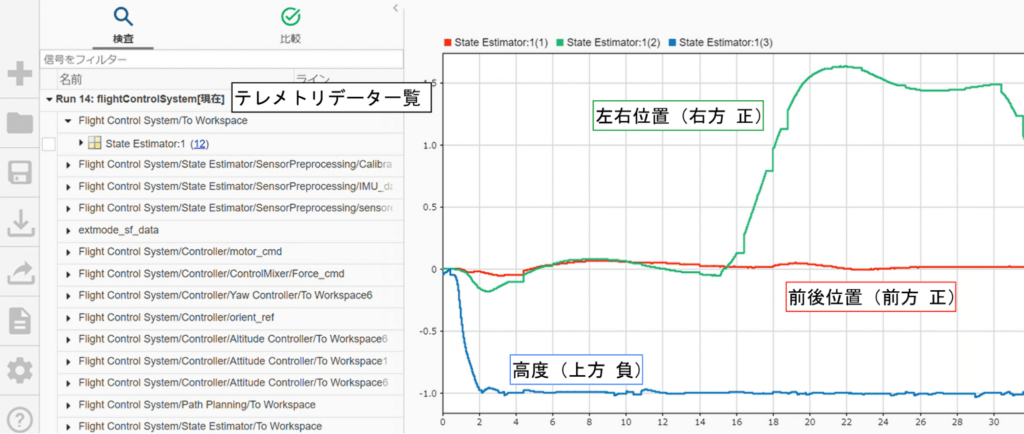
Drone guidance control and flight testing
■Guidance control and flight test


Next round of testing to upgrade flight analysis
Based on the confirmation of usefulness obtained through this series of validation flows, we plan to conduct further tests in the summer of 2025 using the new aircraft to gather knowledge useful for improving the guidance control and design platform of the rocket.
The new aircraft will be a drone with a mechanism similar to the rocket’s control mechanism, which will be used to measure and verify the system identification of the physical layer through HILS and other methods, and to further expand the P4SD flight test PF in order to build a foundation for agile development.
Others Reference image






■We are actively recruiting human resources!
We want to go to space from Japan.
We take on the challenge.
Aerospace technology x Knowledge of different industries x Backcast thinking
Create new industries with an eye on the future.
Let’s do work that is worth the challenge of our lives.
Click here for the employment page:
https://www.wantedly.com/companies/company_9146989
For business partnerships and other inquiries, click here
https://innovative-space-carrier.co.jp/contact/
■We are accepting “advanced applications” for space travel
Please follow this link to register.
https://forms.gle/TDc8HpdcR2zCU41t9


